






@article{simpleseg,
title={Towards Pixel-Level VLM Perception via Simple Points Prediction},
author={Anonymous},
journal={arXiv preprint arXiv:2025.xxxxx},
year={2025}
}Abstract
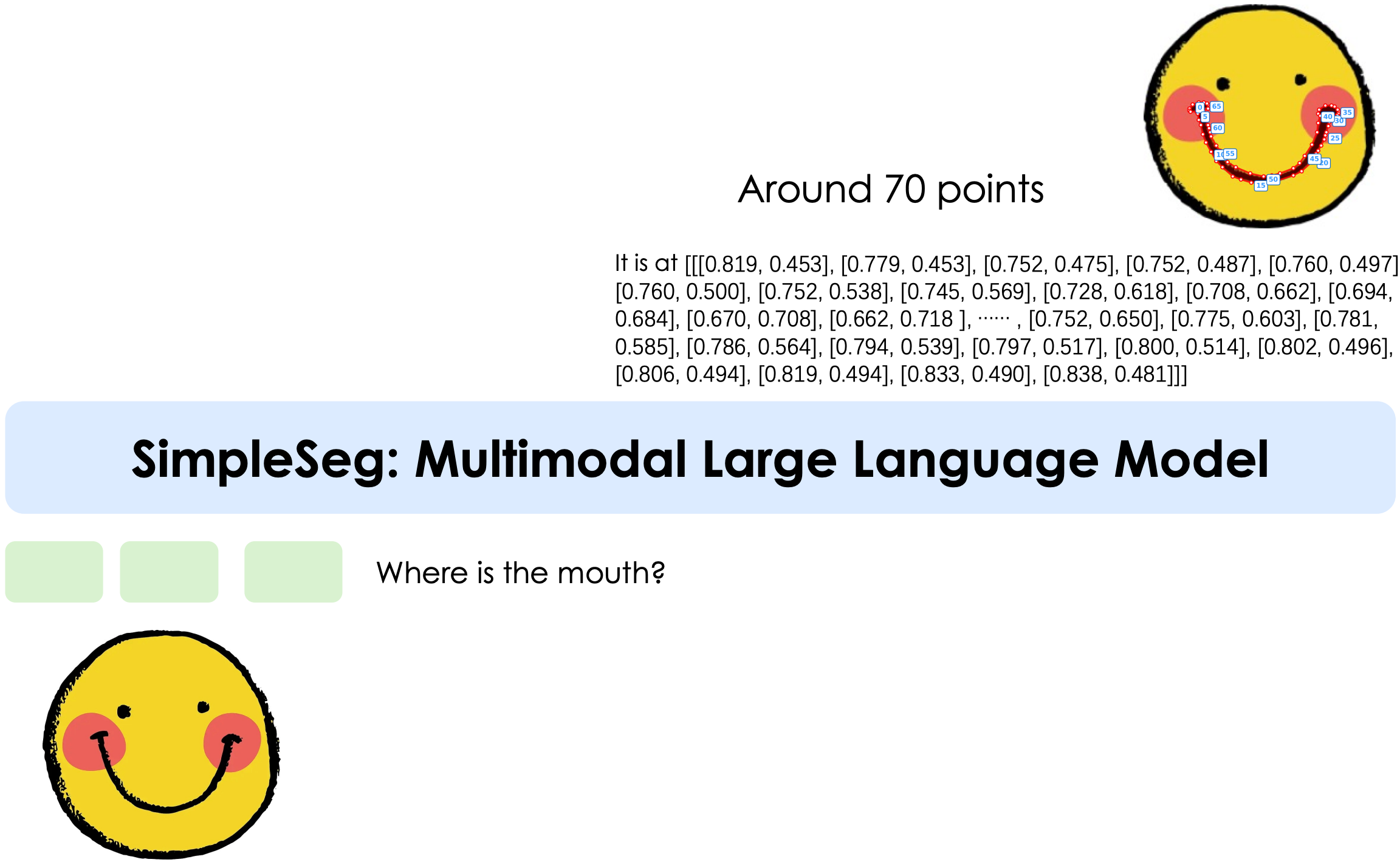
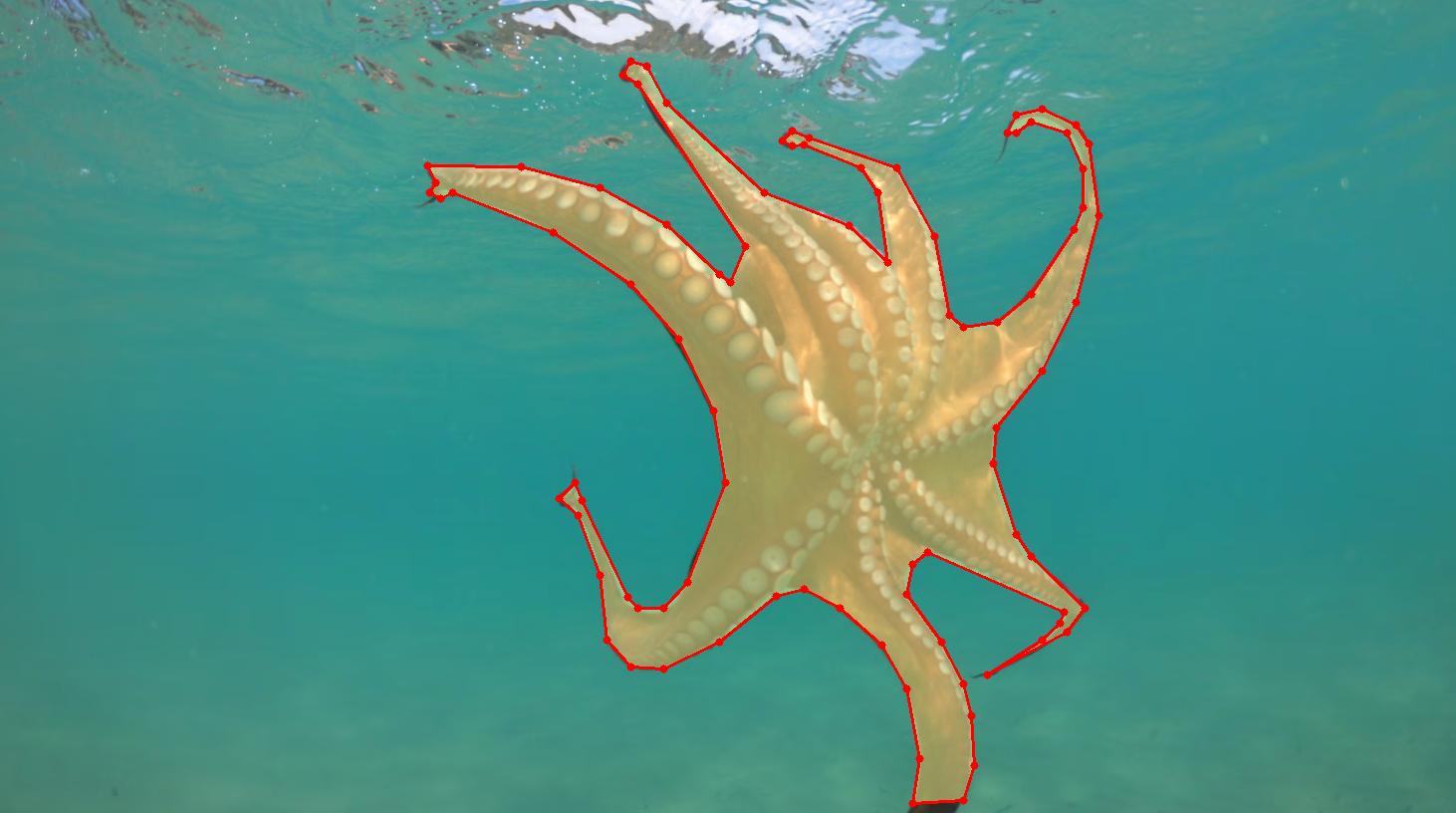
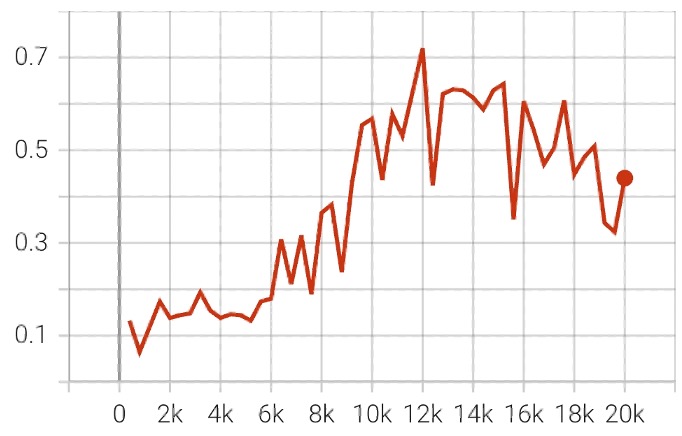
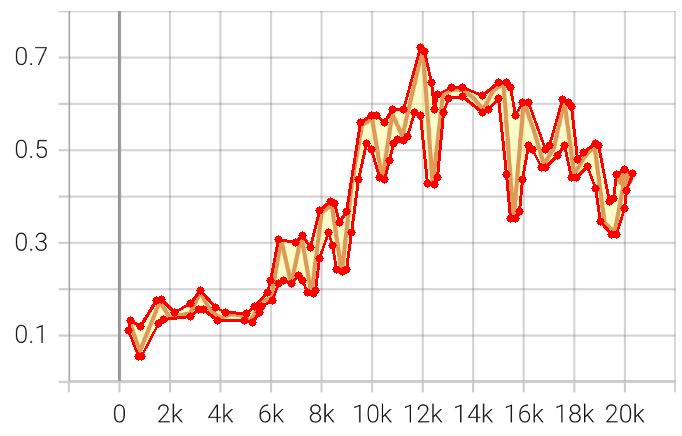
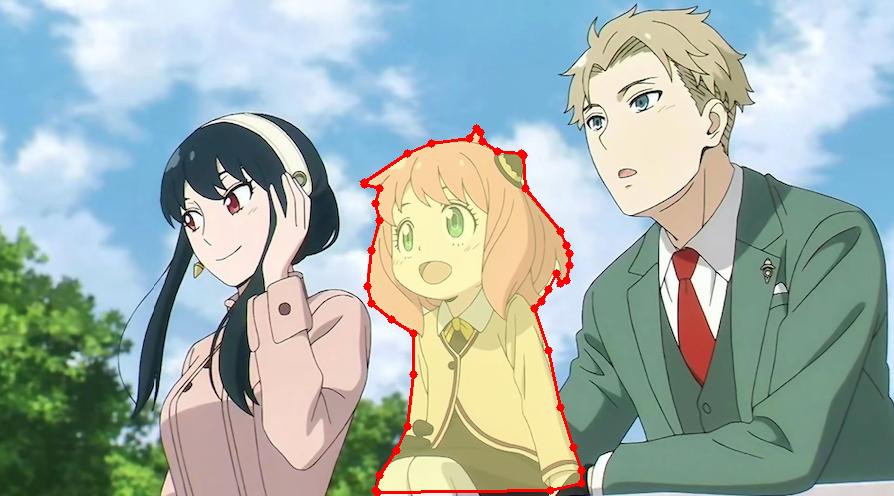
We present SimpleSeg, a strikingly simple yet highly effective approach to endow Multimodal Large Language Models (MLLMs) with native pixel-level perception. Our method reframes segmentation as a simple sequence generation problem: the model directly predicts sequence of points (textual coordinates) delineating object boundaries, entirely within its language space. To achieve high fidelity, we introduce a two-stage SFT→RL training pipeline, where Reinforcement Learning with an IoU-based reward refines the point sequences to accurately match ground-truth contours. We find that the standard MLLM architecture possesses a strong, inherent capacity for low-level perception that can be unlocked without any specialized architecture. On segmentation benchmarks, SimpleSeg achieves performance that is comparable to, and often surpasses, methods relying on complex, task-specific designs. This work lays out that precise spatial understanding can emerge from simple point prediction, challenging the prevailing need for auxiliary components and paving the way for more unified and capable VLMs.
Key Benefits
- Simplicity: SimpleSeg requires no specialized modules and adheres to the standard MLLM architecture, it can be seamlessly and efficiently integrated as a new, core pre-training task for foundation models, similar to visual grounding.
- Task Generality: By framing segmentation as a text-generation problem, our approach is inherently flexible. The model can be easily adapted to a wide range of vision-language tasks that require precise spatial localization.
- Interpretable Output: The model generates explicit, human-readable coordinate sequences instead of dense pixel masks. This transparency simplifies debugging and makes the output directly usable for downstream applications like interactive editing or tool use.